Introduction
A spline is a function that usually represents a piecewise polynomial. Splines have a variety of applications, from being used to visualize a curve to representing motion in animation, to model a surface, or for artistic visualizations.
Our project on Arc Length Splines aimed to satisfy a new necessity in spline formulation- an analytically computable arc length. We aim to allow users to output the arc length and further constrain the spline using the arc length. Further, we want to ensure some amount of continuity on the spline.
Background
Continuity
In the context of splines, continuity can be defined as having no sudden change in value across the spline function. There are two kinds of continuity discussed here, namely parametric (C) and geometric (G) continuity.
There are different levels of continuity dubbed C1 continuity, C2 continuity, and so on until Cn continuity. (The same applies to G as well)
A Ci continuous spline is defined as one where for a function f(t) that defines the spline, f i (t) is continuous for all points t, where i represents the order of the derivative. This is usually true for each curve that is in the spline. The points of interest where continuity may not occur are at the points where two curves meet, called the joints. To verify if there is continuity at the joints, we can use the following method:
Assume we have two curves A and B where the endpoint of A is connected to the starting point of B. These curves are parameterized on the domain [0,1].
A and B form a Ci continuous spline if
Ai (1) = Bi (0)
This can be used to verify any spline made of an arbitrary number of curves, given that for every two consecutive curves connected at a joint, they satisfy the above condition.
Any Ci spline is also C0, C1 … Ci-2, Ci-1continuous.
Gi continuity is based on the “geometric” smoothness of the curve. Where G1 is the continuity at the tangents along the spline. G2 continuity refers to the continuty of the curvature along the spline.
Continuity plays an important role in how a spline’s application may behave. For example, if a spline is acting as a path for an object moving along it, if the spline is not C1 continuous (meaning each consecutive curve has an endpoint that meets at the joint of the spline but with discontinuities for the first differential), the spline may not be useful. This is because objects would likely move at different speeds along different curves(or increase and decrease in speed at the joints.) This is what makes continuity a desirable property in spline applications.
Approximating vs interpolating control points
Splines can be changed based on their control points. Splines that go through the entire set of control points are called interpolating splines (since they interpolate between the entire given set of control points). In an approximating spline, the spline approximates the polyline made by the control points into a smooth curve.
Local and Global control
Based on the constraints on the spline formulation, the control points have influence over certain parts of the spline. In cases where a control point only effects the curve at which it acts as a joint (or is the point that directly decides how two curve segments are to be formed), the spline is said to have control points with local control. (Local being the curves before and after the control point at a joint).
In some cases, constraints may influence larger parts of the spline beyond local curves, this is referred to as global control.
It is usually desirable to have local control for applications like spline drawing, where we want to create a curve of a certain visual form without largely impacting the rest of the spline it is a part of.
Arc Length
Arc length is the distance along the curve given two points on the curve. For any arbitrary curves, arc length can be integrated between two points. For special curves such as circles or parabolas, there is an analytically computed arc length. Our choice of curve and interpolation schemes to explore were driven by where we could analytically calculate arc length for a curve. This also influenced other considerations of our spline.
Past Work
Most of our inspiration came from the paper “A Class of C^2 Interpolating Splines” by Cem Yuksel(2020). Yuksel was able to classify four different types of splines that maintained C^2 continuity and interpolation. These were splines using the Bézier interpolation function, circular interpolation function, elliptical interpolation function, and hybrid (circular-elliptical) interpolation function. Yuksel(2020) used a combination of the base curve and a blending function to maintain continuity.
The use of a blending function is excellent for ensuring continuity between different kinds of curves. However, our goal is to have an exact arc length. The function Yuksel(2020) uses was a second order trigonometric function. Thus, there was no closed formula for the arc-length of for the blending function.
Our work
After initial review of past literature- we compiled a set of curves in which an analytical solution for arc length exists. We dived deeper into curves which have closed formula arc length. The main curves of this family are circles, parabolas, catenoids, and the logarithmic spiral. We then focussed on creating splines out of this initial set of curves. Through this process, we recognised that circular curves may be the best option, not only because their arc length is easy to calculate, but presented properties to create a locally controllable spline with C1 continuity.
A spline is formed when we connect an endpoint of two curves to each other. To formulate a circular spline, there are different ways to connect them. One option was to just draw line segments between two arcs. The problem is that this may not always be continuous if further constraints are not provided.
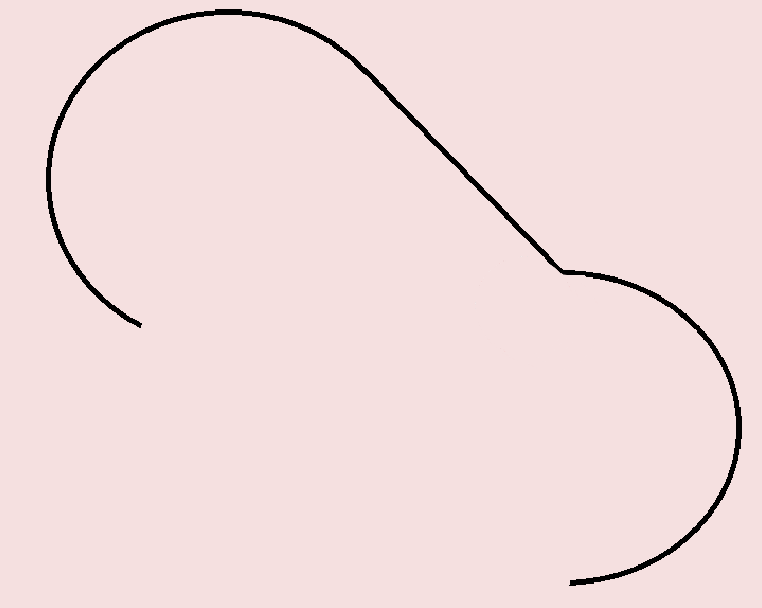
Another way to connect two circular arcs is to use the Dubins Path. Dubins Paths are usually used in robotics or car path planning. Since they are used to find the shortest path between any two curves which have constraints on curvature, they work perfectly to find a connecting path between two circular arcs.

If a line segment between two curves is not a line segment, Dubin’s path instead form it’s own curve to draw between the two. These are known as CCC paths (where C stands for curve).

This ensures we no longer constrain user outcome and provide additional output for a user to adjust visually. The arc length of a Dubins path can also be computed analytically. This is because in all possible cases of a Dubins path, the path will either be a line segment or another circular arc. This allows for the analytical calculation of arc length across the entire spline while also ensuring C1 continuity. This fits with our requirements for an arc-length computable spline retaining at least a C1 continuity property.
We then worked on implementing the idea above: a set of circular arcs whose spline is formed with the dubins path connecting them.
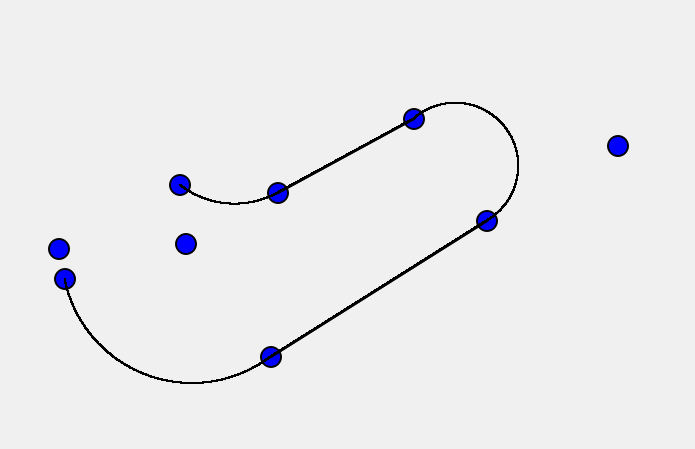
To implement circular arcs, we used two points and a tangent from one of them to determine a circular arc. This would equate to 3 points used per arc. Using a set of 6 points (which form 2 circular arcs), we then create a path between them.
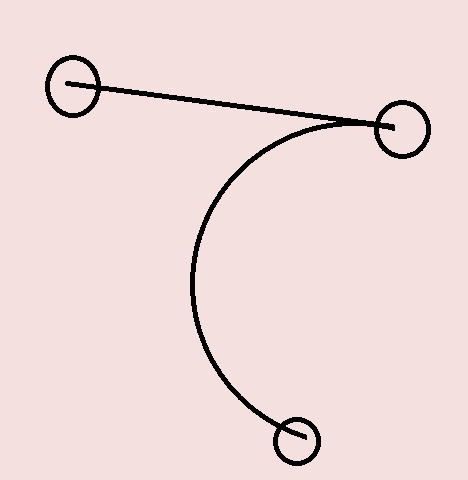
Our current implementation allows for the creation of circular arcs with straight paths formed between them.
Future work
Our current implementation is limited, we intend to improve it in the following ways:
- Ensure a Dubins path for all cases of circular arcs
- Create arc length constraints as well as outputs for users to view and edit
- Better interface to clearly demarcate between different curves, tangent points and circular arc points.
- Implementing higher order continuity while ensuring lesser constraints on spline editing.
References
[1] Cem Yuksel. 2020. A Class of C2 Interpolating Splines. ACM Trans. Graph. 39, 5, Article 160 (October 2020), 14 pages. https://doi.org/10.1145/3400301
[2] Salix Alba (2016, 6 February) Dubins3.svg https://upload.wikimedia.org/wikipedia/commons/e/e7/Dubins3.svg
[3] Salix Alba (2016, 6 February) Dubins2.svg https://upload.wikimedia.org/wikipedia/commons/e/e7/Dubins2.svg
[4] Freya Holmér. (2022, December 7). The continuity of Splines [Video]. YouTube. https://www.youtube.com/watch?v=jvPPXbo87ds
This blog was written by Sachin Kishan and Brittney Fahnestock during the SGI 2024 Fellowship as one of the outcomes of a project under the mentorship of Sofia Wyetzner and the support of Shanthika Naik as teaching assistant.