On the first day of the Symposium on Geometry Processing (SGP), I was excited to learn two things: how welcoming the geometry processing community is and different techniques for mesh stylization.
First, it was relieving to me when joining the ice-breaker events on the first day of SGP to learn how welcoming the community is to attendees from all levels. At first, I was scared to introduce myself as an undergraduate student who is new to this discipline and am going to work in SGI as a summer fellow. However, the graduate students, postdocs, and professors were really welcoming, and I was excited to see some of the mentors in the breakout rooms. Through conversations with other Ph.D. students, professors, and engineers in non-academic disciplines, I realized how people from different backgrounds can all contribute to this field. This eased my nervousness from the past two days and motivated me to explore more about geometry processing through SGP!
Second, I would like to highlight two talks in mesh stylization given by Maximilian Kohlbrenner and Hsueh-Ti Derek Liu, respectively, titled “Gauss Stylization: Interactive Artistic Mesh Modeling based on Preferred Surface Normals” and “Normal-Driven Spherical Shape Analogies”. To begin with, a style is a “distinctive manner which permits the grouping of works into related categories” (Fernie 1995, referenced in Liu’s talk). In geometry processing, stylization tools take a piece of geometry and reshape it to have a distinctive appearance. Some elements of style are straightforward, such as shapes, proportions, and lines. One previous stylization method is cubic stylization, whose objective function sums an as rigid as possible (ARAP) energy term and a “cubeness” term with a scalar weight \(\lambda\).
In Kohlbrenner’s talk, he discussed Gauss stylization, which subtracts cubeness from the ARAP energy instead of adding them together. Then, they reformulate their energy by decoupling the normals such that there are 3 sets of variables, leading to an ARAP-like optimization method. It was difficult for me to follow the details, but this is the big scale picture I learned from the talk. It is interesting to me not only because all of these are new but also because being able to see the new shapes they create from Gauss images. It would not occur to me how editing surface normals can change the look or use of a piece of geometry so much.
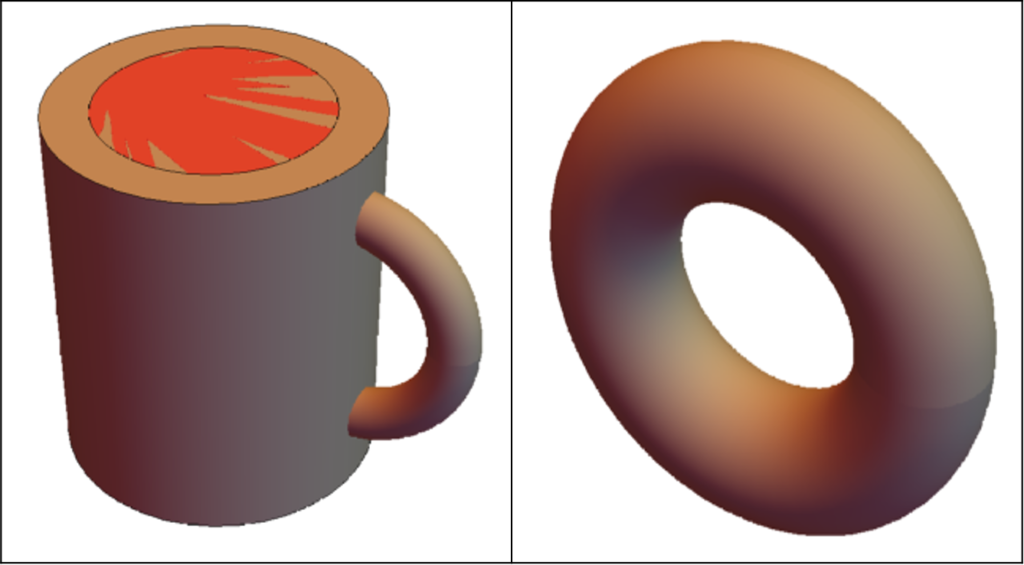
Liu introduced another normal-driven algorithm to stylize different shapes. The main idea of his 3-step algorithm works as follows. First, he matches the sphere to a style template. Second, he matches the sphere to an input shape. Last, he does deformation (optimization) through a normal-based method. His work uses two different constructions related to shape matching and editing: the Gauss map and curvature flow. As introduced above, Gauss maps go from every point on a surface to its normal on the unit sphere, which can be edited to express a transformation of a surface. After describing the basic steps of his method, Liu discussed the difficulty of the optimization process and his approach. The difficulty lies in the fact that the equations are nonlinear. However, with a change of variables, the equations show how some of his variables can be computed using a single SVD while others can be computed by solving a linear problem. Just like Kohlbrenner’s method, Liu’s algorithm alternates between these two steps to optimize. This research is interesting to me as this algorithm not only achieved the initial goal but also can be used in practice. In the end, he also discussed a lot of extensions and applications that are possible to explore or learn. Some include applying other energy terms (instead of the ARAP one), polycube, and geometric texture.
I really enjoyed these two lectures, which introduced Gauss maps and other related shape synthesis ideas. The contents motivate me to explore more about mesh stylization and I am excited to learn more about them in the future.
Categories