While the official start date, 19th of July, is still a couple of days from now, the SGI experience began the very day I received the acceptance letter back in March. In this post I briefly share my thoughts on the journey so far – SGI’s social event, attending the Symposium on Geometry Processing 2021, and my implementation of a paper presented in the conference.
Slack and Virtual Coffees
The SGI slack channel was created at the end of March and has been buzzing with activity ever since. Initially, as everyone introduced themselves, I was proud to see that I am a part of a team that is truly diverse in every aspect – geographically, racially, religiously and even by educational backgrounds!
Shortly after, we started biweekly ‘virtual coffees’ in which two people were randomly paired up to meet. These sessions have been instrumental in refining my future goals. As someone who entered research just as the world closed down and started working from home, I haven’t had the opportunity to visit labs and chat with graduate students during the lunch break or by that water cooler. Speaking with professors, teaching assistants and SGI Fellows has debunked many of my misconceptions regarding graduate school. Additionally, I also learned a lot about possible career paths in geometry processing and adjacent fields like computer graphics, and about the culture in this community.
Symposium on Geometry Processing
SGP was a comprehensive four-day event including tutorials, paper presentations and talks on the latest research in the field. While all the sessions were amazing, I was especially awed by the keynote ‘Computing Morphing Matter’ by Professor Lining Yao from Carnegie Mellon University. She talked about various techniques that combine geometry, physics, and material science to create objects that can change shape in a pre-determined manner. This ability to morph can be leveraged in various ways and across many industries. To list a few of its usages, it can be used to create a compact product that can morph into the final shape later thus saving packaging material and shipping costs, to develop self-locking mechanisms, and to produce aesthetically appealing shapes. Due to such varied use cases, morphing matter has applications in furniture designing to food production to engineering problems.
Implementing ‘Normal-Driven Spherical Shape Analogies’
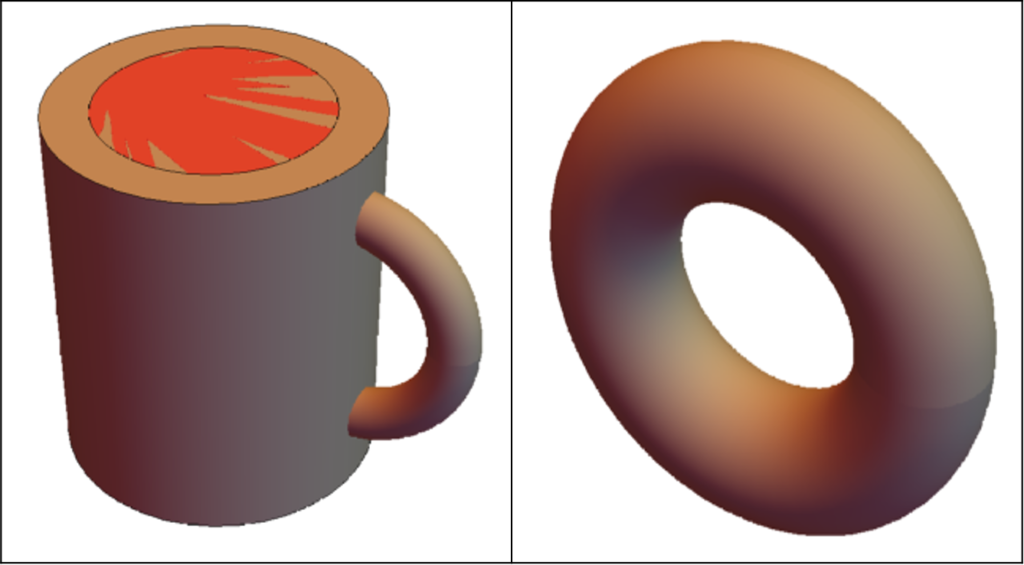
In one section of the tutorial ‘An Introduction to Geometry Processing Programming in MATLAB with gptoolbox’ at SGP, the ease with which complex problems can be solved using MATLAB and gptoolbox was demonstrated by implementing research papers. I had never before seen a language/library tutorial that included paper implementations and was delighted at the prospect of turning the tedious process of learning a new tool into an exciting process of implementing a research paper. Eager to test out this new way, I implemented one of the research papers presented at the SGP – ‘Normal-Driven Spherical Shape Analogies’ by Hsueh-Ti Derek Liu and Alec Jacobson.
The paper details how an input shape can be stylized to look like a target shape by using normal driven shape analogies. The process boils down to three steps:
- Compute the mapping between a sphere and the target shape.
- Using the sphere-target shape mapping as an analogy, find the target normals for the input object.
- Generate the stylized output by deforming the input object to approximate the target normals.

Input object 
Target shape 
Stylized output
When I arrived at code that gave outputs that looked right, I faced an unanticipated problem: Without any error metric, how can you know that it’s working well? After working on this project I definitely have a renewed appreciation for work in stylization.