SGI Fellows were registered for and invited to attend the Symposium on Geometry Processing (SGP), the premier venue for disseminating new research ideas and cutting-edge results in geometry processing.
I am writing this from the comfort of the EST time zone and from a boring but quiet dorm room. The Symposium on Geometry Processing (SGP) has successfully reminded me of the existence of a world outside my current location – a remarkable feat, especially given the forced geographic sedentarism of the past year and a half. Plenty of SGP attendees were active, participating, asking questions, and being engaged, despite it being late at night or very early in their time zones. Many other people will watch the SGP recordings on Youtube in the upcoming days. The concluding remark of “have a great day, or afternoon, or evening, depending on where you are right now” gave insight into precisely how geographically widespread the geometry processing community is.
Before delving further, some context is warranted: SGP is a yearly conference where people disseminate new results and ideas placed at the enticing intersection of theory and applications of mathematics, computer science, engineering, and other subjects. This year’s event is divided into the Graduate School (July 10-11) and the Conference (July 12-14). As I am writing this, it is July 11, so I have only attended the Graduate School events so far.
Out of the talks I have attended, I want to focus on the Introduction to Geometry Processing Programing in MATLAB with gptoolbox. It is a fantastic tutorial prepared and presented by Hsueh-Ti Derek Liu, Silvia Sellán, and Oded Stein, and advised by Alec Jacobson. The tutorial is comprehensive and explains how things fit together in a bigger context. Furthermore, it provides the possibility for hands-on Matlab experience, which comes with solutions in case you get stuck.
For context, gptoolbox is a set of Matlab functions for geometry processing, aimed to make things easier and to prevent researchers from reinventing the wheel. I will tell you three new things I took away from the tutorial. This is, of course, not to say that there were only three things one could take away! In fact, I encourage you to watch the video and try to find more.
First, it was great to see how “from-the-ground-up” the teaching approach was. I prefer to prevent, rather than fix, technical crises, and the introductory bits of Matlab knowledge (such as: if you want to suppress the output of a statement, terminate the statement with a semicolon) were very welcome. I spent more evenings than I would like to admit trying to compile non-working code, only to realize – by trial-and-error – that my mistake was fixable in 3 seconds. As such, explicitly stating things, with no assumption of prior knowledge, was great.
My favorite part from Oded’s section was learning how to give objects shadows, as well as playing with the way light is reflected from the surface of the object. The tutorial covered techniques based on the Phong reflection model, so I look forward to learning additional approaches and more nuanced techniques.
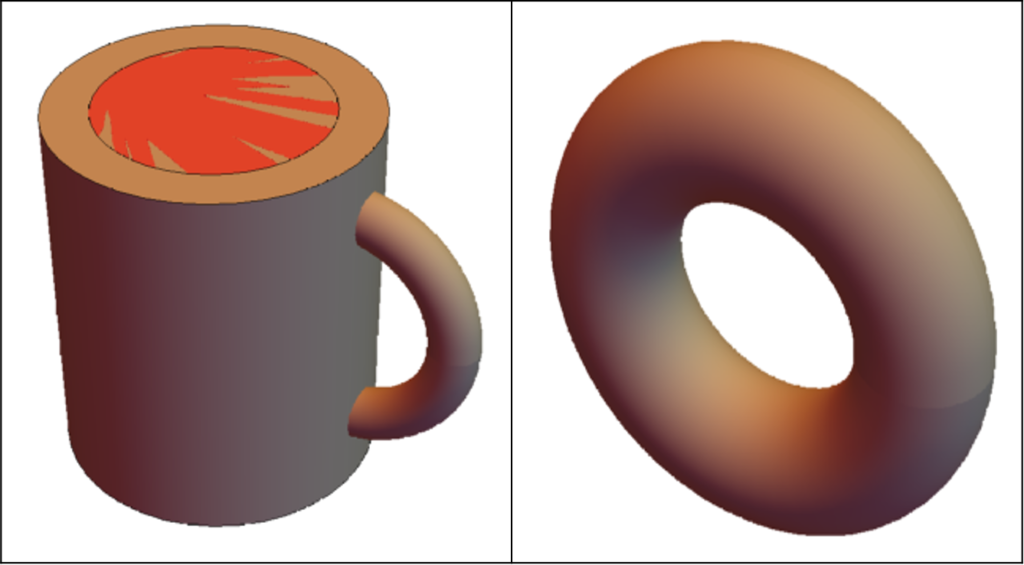
Second, I was especially intrigued by the part on spectral conformal mapping in Derek’s section. Not only do we get to see the theoretical description of a geometric process, the knowledge of how important the subroutine is, and the paper it is first described in, but we also get a visual representation on how the algorithm works. We get a “before” and “after” picture of a shape that is familiar to us, alongside theoretical descriptions of mathematical objects. It turns out, you CAN have the best of both (mathematical) worlds!
Third, I was especially fascinated by the ability to triangulate a 2D shape in just two lines of code with the help of the get_pencil_curve function. The idea is that you can “call” the function and draw any shape you would like, using your mouse click as the line input. First, Silvia illustrated the need for such a tool before introducing it. But also, after triangulating the figure, she outlined – for comparison – the work one might need to do to get the same result had we not had gptoolbox. The alternative included at least two other programs and the word “export” multiple times, which not only sounds like a lot of work, but also like a logistical nightmare.
As a newcomer to geometry processing, it was good to see the dedication to knowledge exchange and the great efforts made to be inclusive towards the largest possible number of people. I spent part of this summer watching geometry processing courses to bring myself up to speed with the discipline, and my brain was ecstatic when it recognized concepts I had studied earlier, or when it was able to make connections on its own. The existence of the Graduate School made me only more excited for what is in store for the rest of the conference and for the rest of the summer. So, I am keeping my brain open for all the knowledge acquisition that will undoubtedly occur during SGP and, afterwards, during Summer Geometry Institute (SGI).
Lastly – the Graduate School at SGP gave me an idea of the level of growth I will experience in the coming weeks, first at the SGP talks, and – next – at SGI. Not only will I learn a lot, but it will also be fun and incredibly rewarding! I think it will be especially interesting to put this post side by side with one I will write closer to the end of the SGI program, and to compare the difference marked by a few weeks of intensive learning.