By Aditya Abhyankar, Biruk Abere, Francisco Unai Caja López and Sara Ansari
Mentored by Kartik Chandra with help from the volunteer Shaimaa Monem
In this project we are looking for ways to generate physical illusions. More to the point, we would like to generate objects that, similarly to this bird, can be balanced in a surprising way with just one support point. To do this we have considered both the physics of the system and we draw on theories from cognitive science to model human intuition.
1. Introduction
Every day in your life, you make thousands of intuitive physical judgements without noticing. ‘Will this pile of dishes in the sink fall if I move this cup?’, ‘If it does fall, in which way will it fall?’ The judgements we make are accurate in most scenarios, but sometimes mistakes happen. Just like how occasional errors in vision lead to visual
illusions (e.g. the dress and the Muller-Lyer illusion) occasional errors in intuitive physics should lead to physical illusions. To generate new illusions, there are two steps that could be followed.
- First, we could design a method that appropriately models the way people make intuitive judgements based on their perception of the world. In that regard it’s interesting to read [1] which models intuitive physical judgement via physical simulations.
- Secondly, we could try to ‘fool our model’ or to find an adversarial example. That is, find a physical scenario in which the output of the model is wrong. If the model is appropriately chosen, the results may also fool humans, thus producing new physical illusions. This approach has been used in [2] to generate images with properties similar to the dress.
In this project we aim to find a different kind of illusion. Consider the following toy (image from Amazon). Many people would guess that the bird would fall if it’s only supported by its beak.

However, the toy achieves a perfectly stable balance in that position. We seek to find other objects that behave similarly: they achieve stable balance given a single support point even when many people guess that it is going to fall.
2. Physical stability vs intuitive stability
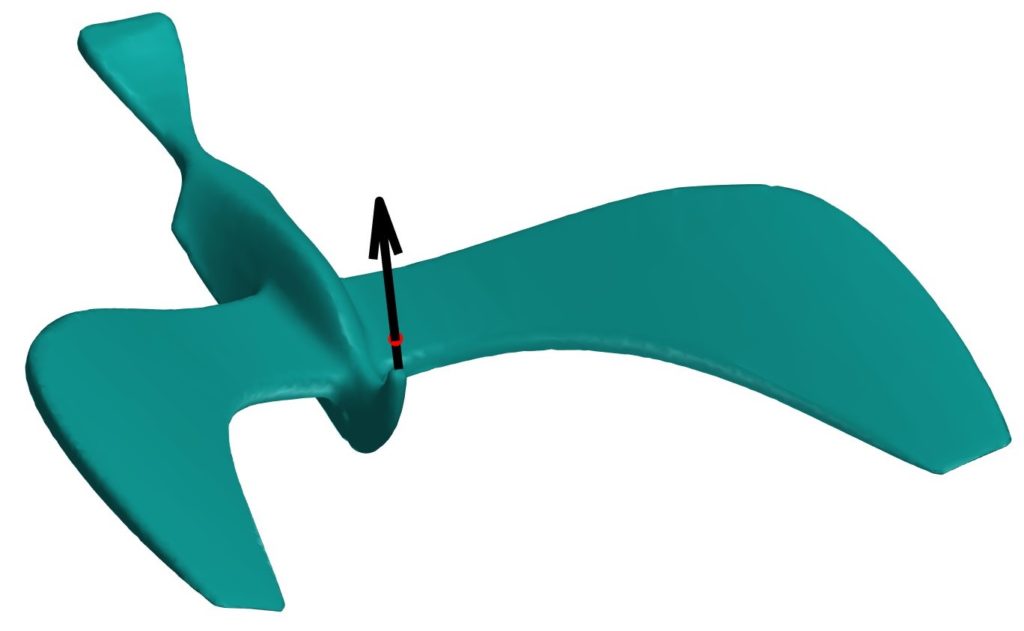
Consider a frictionless rigid body with uniform density and a point p on its boundary with unit normal n. For the object to balance at p, its normal n must point ‘downwards’ in the direction of gravity, for otherwise it will slide. Perfect balancing will then be achieved if the line connecting p and the object’s volumetric center of mass (COM) m is parallel to n. This can be achieved for the balancing bird when the point p is the beak as can be approximately seen in the following figure (mesh obtained from thingiverse). Here we have the center of mass in red and the vector showing the direction of m−p.
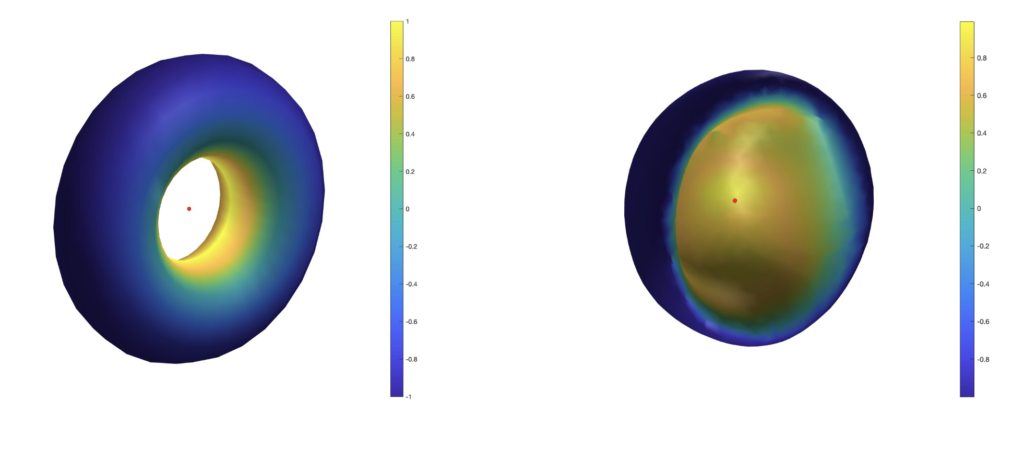
Since an object can always be rotated so that n points downwards, the quality of the balancing can be assessed by the evaluating the dot product (m−p) · n. To be precise, we use the normalized vectors to compute the dot product. The greater this value, the more stable the balancing at p. If m−p and n are parallel and have the same direction, then a perfect balancing will be achieved, and it will be stable. If they are parallel with opposite direction, a perfect balancing will still be achieved, but it will be unstable; i.e. small perturbations will make it fall. Points with dot product values in between will lie somewhere on a spectrum of stability, determined by their dot product’s closeness to the positive extremum. To illustrate this concept, we have taken a torus and a ‘half coconut’ mesh and plotted the dot product of normalized m−p, n. The center of mass appears in red.
There is some evidence [4] that humans asses a rigid body’s ability to stably balance at a point in a very similar way. The only difference is that instead of considering the object’s actual COM, whose location can be counterintuitive even with uniform density, humans judge stability based on the COM mch of the object’s convex hull. Thus to find an object that stably balances in a way that looks counterintuitive to humans, we must search for objects with at least one boundary point p such that (m−p) · n is maximized, but (mch−p) · n is minimized.
In general, to compute the center of mass of a region M⊂ℝ3, we would need to compute the volume integral
\(\mathbf m=\left(\int_{M}x\rho(x,y,z)\,dxdydz,\int_{M}y\rho(x,y,z)\,dxdydz,\int_{M}z\rho(x,y,z)\,dxdydz\right)\)
where ρ is the density of the object. However, for watertight surfaces with constant density, this volume integral can be turned into a surface integral thanks to Stokes’ theorem. Therefore, the center of mass can be computed even if we only know the boundary of the object, which for us is encoded as a triangle mesh. The interested reader learn more about this computation in [3].
3. Finding new illusions
Given a mesh, one simple way to find new illusions would be to look for a vertex p such that (m−p) · n is positive and close to its maximum, while (mch−p) · n is as small as possible (again, we will use normalized versions of the vectors). Of course, these are two conflicting tasks. In this project we have chosen to maximize a function of the form
\(w\frac{(\mathbf m-\mathbf p)\cdot \mathbf n}{\vert \mathbf m-\mathbf p\vert}-\frac{(\mathbf m_{\text{ch}}-\mathbf p)\cdot \mathbf n}{\vert \mathbf m_{\text{ch}}-\mathbf p\vert}\)
where w is a weight. By increasing w, we are more likely to find points were m−p and n are almost parallel, which is desirable to achieve a stable balance. The most interesting results were found when (m−p) · n ≈ |m−p| and (mch−p) · n < 0.7|mch−p|. For instance, we have the following chair.
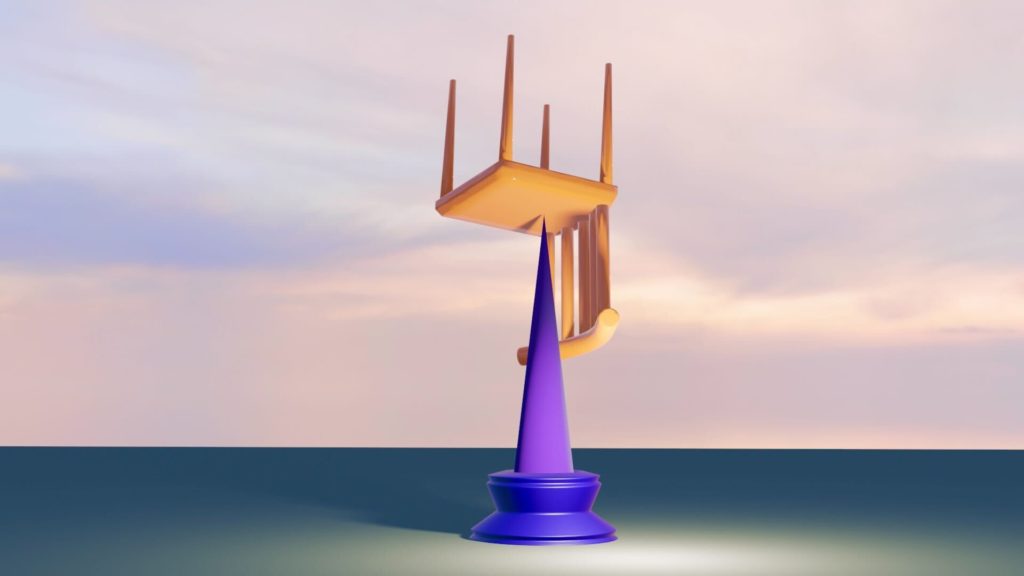
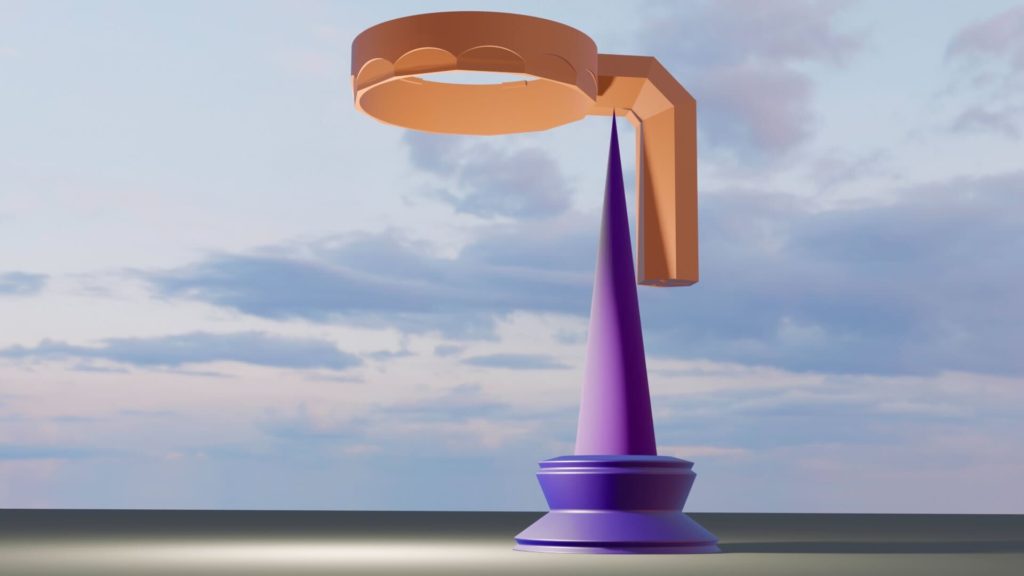
This chair is part of the SHRECK 2017 dataset. We also examined some meshes from Thingi10k and one of the results was the following.
In the previous pictures, assuming constant density, each object is balanced with only one support point. Finally, we have the following hand which can be found in the Utah 3D Animation Repository.

4. Results and future work
Here we list some limitations of our project and ways in which they could be overcome.
- Are we certain that the results obtained really fool human judgement? Our team finds these balancing objects quite surprising or, at the very least, aesthetically pleasing. We could try giving more definite proof by designing a survey. For example, people could look at different objects supported at a single point and guess if the objects would fall or not.
- We have only verified that the objects should be stably balanced by computing the location of the center of mass. We could further test this by running physical simulations and by 3-D printing some of the examples.
- Given a 3-D object that has already been modeled. We checked whether it could be balanced in any surprising way. One step forward would be generating 3-D models of objects that verify the properties we desire. It would be desirable that given a mesh (e.g. of an octopus), we could deform it so that the result (which hopefully still looks like an octopus) can be balanced in a surprising way.
5. Conclusion
Let’s take a step back and see this project has taught us. We started with the question: why do some objects, like the balancing bird, seem so surprising? This led us to study how people perceive objects through their center of mass and, after searching through a variety of 3D data sets, we found objects that also seem to balance in a surprising way. This was a very fun project and we really enjoyed it as a group, it involved playing with a bit of math, the geometry of triangle meshes and making beautiful visualizations while also learning something about human perception. Finally, we would like to thank Justin Solomon for organising the SGI, giving us this wonderful opportunity and Kartik Chandra for offering and mentoring such a fun project.
References
[1] Peter W Battaglia, Jessica B Hamrick, and Joshua B Tenenbaum. Simulation as an engine of physical scene understanding. Proceedings of the National Academy of Sciences, 110(45):18327–18332, 2013.
[2] Kartik Chandra, Tzu-Mao Li, Joshua Tenenbaum, and Jonathan Ragan-Kelley. Designing perceptual puzzles by differentiating probabilistic programs. In ACM SIGGRAPH 2022 Conference Proceedings, pages 1–9, 2022.
[3] Brian Mirtich. Fast and accurate computation of polyhedral mass properties. Journal of graphics tools, 1(2):31–50, 1996.
[4] Yichen Li, YingQiao Wang, Tal Boger, Kevin A Smith, Samuel J Gershman, and Tomer D Ullman. An approximate representation of objects underlies physical reasoning. Journal of Experimental Psychology: General, 2023.